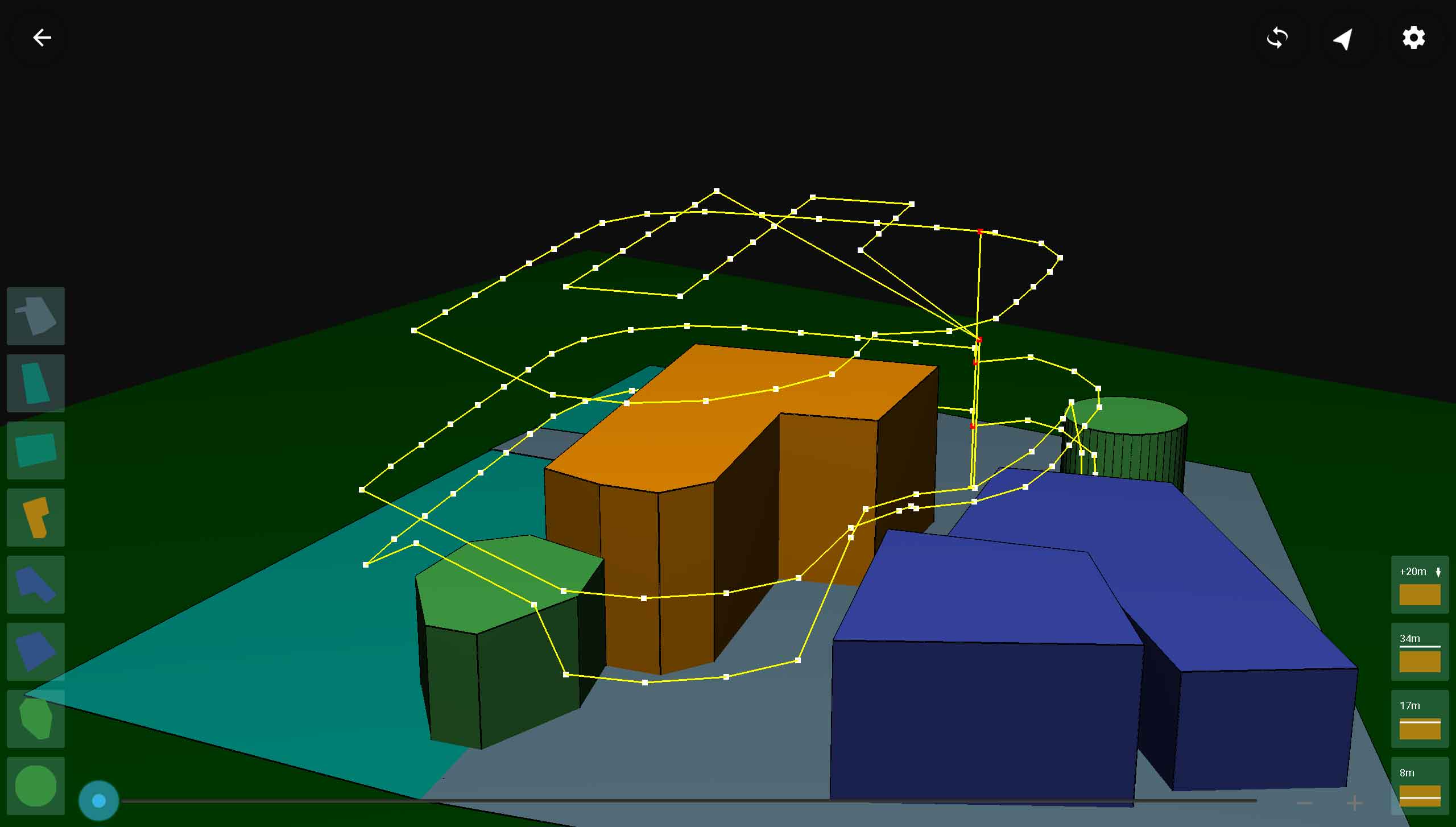
A Site Flight Plan automatically generates missions suitable for capturing a structure (such as a building, a stockpile etc.) from all directions, namely from above and from all sides. This flight plan carefully combines a Top-Down Flight Plan and several Perimeter Flight Plans with different distance and gimbal setups. Example use cases include full inspections of buildings, industrial and construction sites. The guaranteed complete site coverage makes this plan the best choice when acquiring images for 3D models.
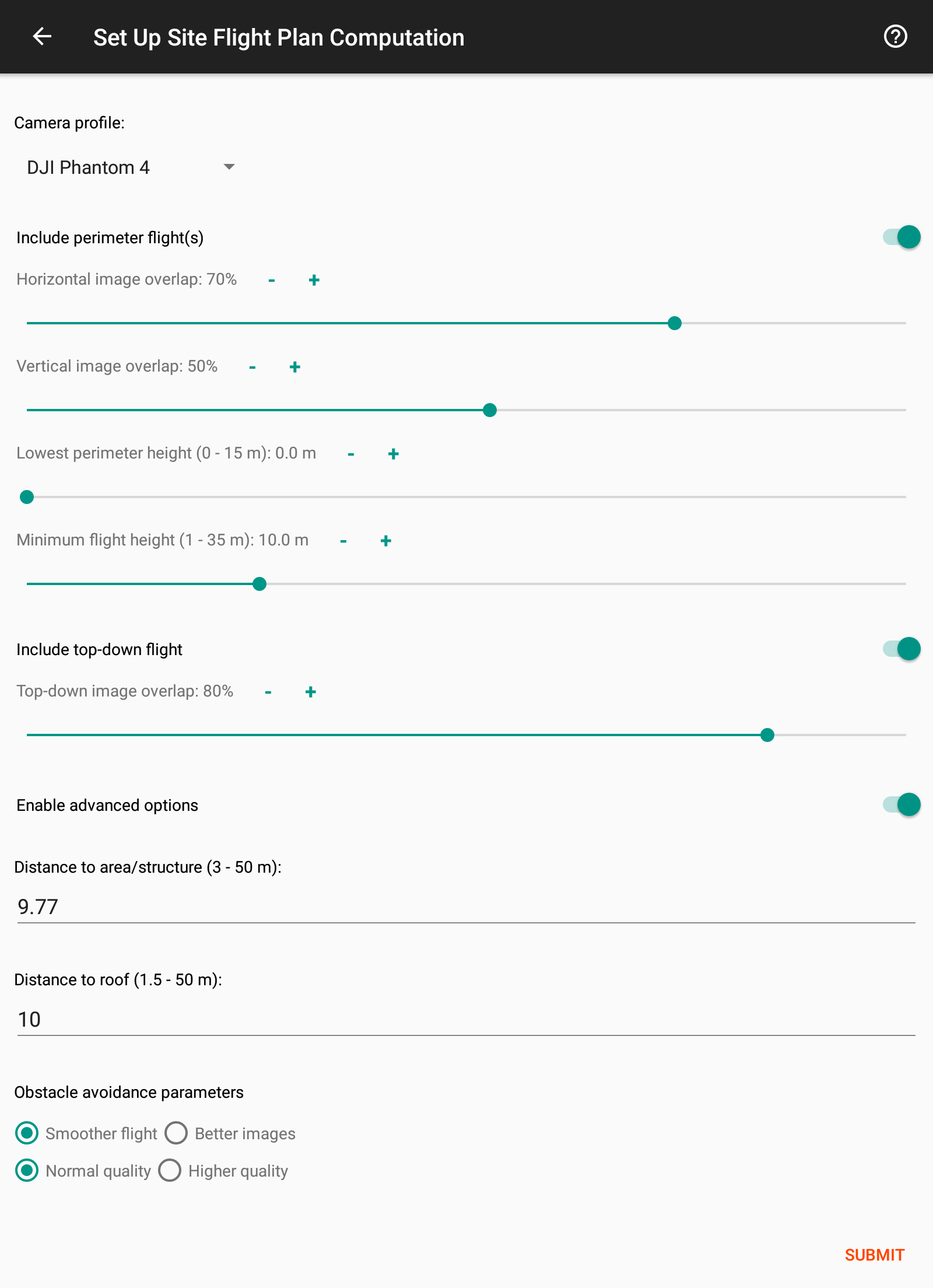
The following parameters can be used to tune a site flight plan.
Copyright 2018 Drone Harmony AG. All Rights Reserved.